Knowledge Acquisition from Sparse Mobile Probe Data
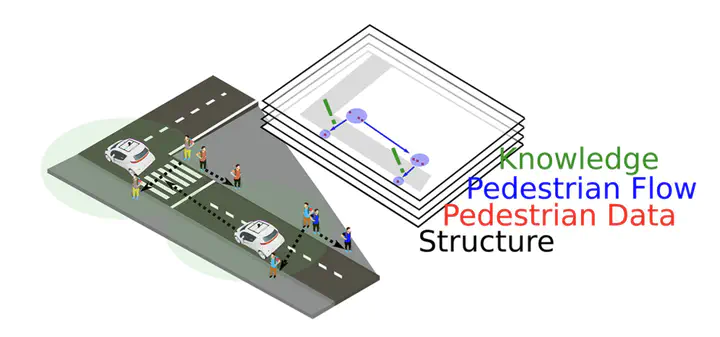 Photo by Ranulfo Bezerra
Photo by Ranulfo BezerraThe “Knowledge Acquisition from Sparse Mobile Probe Data” project addresses challenges faced by autonomous driving systems (ADSs) in urban environments through three interconnected tasks. The first task improves pedestrian trajectory analysis for safer navigation. The second task identifies causes of vehicle behavior changes in different areas, providing insights for more adaptive and responsive ADSs. The third task recognizes traffic regions using driving log data, enhancing navigation capabilities even without visual information. By integrating these techniques, ADSs gain a comprehensive understanding of their environment, leading to better decision-making and safer navigation in complex urban settings. This project aims to overcome current limitations in autonomous driving technology and build public trust.
Ranulfo Bezerra
Assistant Professor
My research interests include multi-robot systems, robotic perception, knowledge acquisition.