自己紹介
東北大学の東北ロボティクスシステム研究室(TRSLab)およびタフ・サイバーフィジカルAI研究センター(TCPAI)において助教として在籍し、接続されたロボットおよびセンサシステムのための推論指向AIに関する研究を行っています。特に、不完全観測下における集団知の実現を目標としています。研究では、マルチロボット協調、分散センシング、知識駆動型意思決定のためのシステムレベルのアーキテクチャに焦点を当て、確率的モデリング、学習ベース手法、セマンティック表現を統合しています。2021年に東北大学大学院情報科学研究科にて博士(情報科学)を取得しました。2018年および2016年に、それぞれブラジルのピアウイ連邦大学にてコンピュータサイエンスの修士号および学士号を取得しました。研究分野はロボット知能およびロボット知覚です。日本ロボット学会(RSJ)およびIEEEの会員です。
興味・関心
- インテリジェント・ロボット・システム
- ロボティック・シングスのインターネット
- マルチロボットシステム
- ロボットの知覚
- 知識の習得
学歴
PhD in Information Sciences, 2021
Tohoku University
Msc in Computer Science, 2018
Federal University of Piaui
BSc in Computer Science, 2016
Federal University of Piaui
最近のニュース
ラヌルフォ・ベゼッラ博士がIEEE IoTジャーナルの編集委員会に招かれる
2023-11-02
ラヌルフォ・ベゼッラ博士がIEEE IoTジャーナルの編集委員会に招かれる
2023-10-02
第21回先端ロボティクス国際会議(ICAR)で2件の論文が採択されました。
2023-10-02
IEEEのSystems, Man, and Cybernetics (SMC)会議で2件の研究論文が採択されました。
2023-05-27
3件の研究論文がIEEE International Conference on Automation Science and Engineering (CASE)に採択されました。
2023-05-25
プロジェクト
*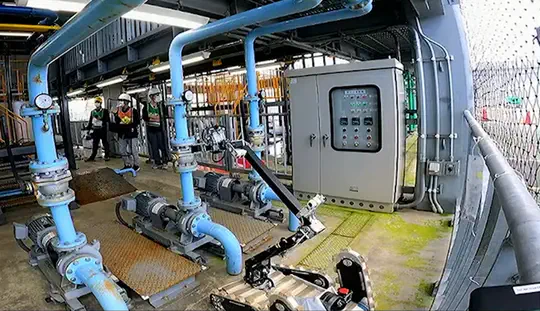

ワールドロボットサミット2020の防災チャレンジでマルチモーダルロボットチームがどのように活躍し、産業プラントの点検を強化したかをご覧ください。
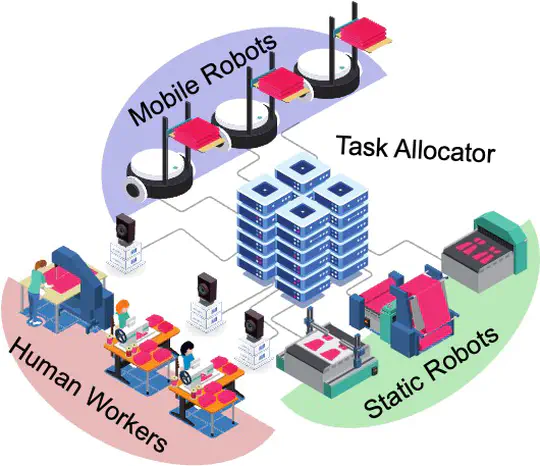
変形生産におけるマルチロボットのタスク割当と制御システム
土木作業における自律走行ダンプトラックと人間操作のバックホーとの最適な相互作用のための機械学習の活用。
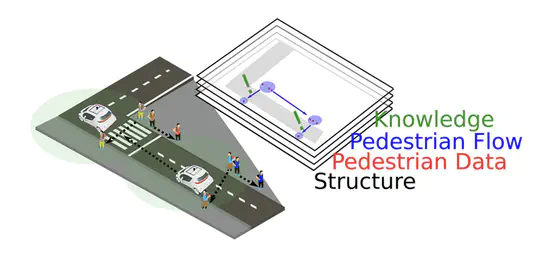
本研究では、知識獲得により自律走行車の知覚を向上させるための様々な技術を提供する。
出版物
素早く関連するコンテンツを出版物のフィルタリングで見つけてください.
(2023).
Heterogeneous Multi-Robot Task Allocation for Garment Transformable Production using Deep Reinforcement Learning.
2023 IEEE 19th International Conference on Automation Science and Engineering (CASE).
(2023).
LayoutSLAM++: Simultaneous Estimation of Layout and Object Map Based on Geometric Features of Object Placement.
2023 IEEE 19th International Conference on Automation Science and Engineering (CASE).
(2023).
Multi-Agent Pickup and Delivery in Transformable Production.
2023 IEEE 19th International Conference on Automation Science and Engineering (CASE).
(2023).
From Mass Production to Transformable Production using Multi-robot Transportation System.
AI and Robotics for Garment Industry.
(2022).
Task Scheduling Problem for Heterogeneous Multi-Robot Garment Mass Customization.
ICRA 2022 Workshop On Collaborative Robots And The Work Of The Future.
お問い合わせ
- ranulfo (at) tohoku.ac.jp
- +81 022-795-4871
- 6-6-01 Aramaki Aza Aoba, Aoba-ku, Sendai, Miyagi 980-8579