Brief Bio
Assistant Professor in the Tohoku Robotic Systems Laboratory (TRSLab) and Tough Cyberphysical AI Research Center (TCPAI)at Tohoku University conducting research on reasoning-aware AI for connected robotic and sensor systems, with the goal of enabling collective intelligence under partial observability. My work focuses on system-level architectures for multi-robot coordination, distributed sensing, and knowledge-driven decision-making, integrating probabilistic modeling, learning-based methods, and semantic representations. I received my Ph.D. degree in Information Sciences from Tohoku University, Japan in 2021. I received my M.Sc. and B.Sc. in computer science from the Federal University of Piaui, Brazil in 2018, and 2016 respectively. My research interests are robot intelligence and robotic perception. A member of RSJ and IEEE.
- Intelligent Robotic Systems
- Internet of Robotic Things
- Multi-robot Systems
- Robotic Perception
- Knowledge Acquisition
PhD in Information Sciences, 2021
Tohoku University
Msc in Computer Science, 2018
Federal University of Piaui
BSc in Computer Science, 2016
Federal University of Piaui
Recent News
Dr. Ranulfo Bezerra Invited to Join the Editorial Board of IEEE IoT Journal
2023-10-02
Two Research Contributions Accepted at Upcoming 21st International Conference on Advanced Robotics (ICAR)
2023-10-02
Two Research Contributions Accepted at Upcoming IEEE Systems, Man, and Cybernetics (SMC) Conference
2023-05-27
Three Research Contributions Accepted at Upcoming IEEE International Conference on Automation Science and Engineering (CASE)
2023-05-25
Projects
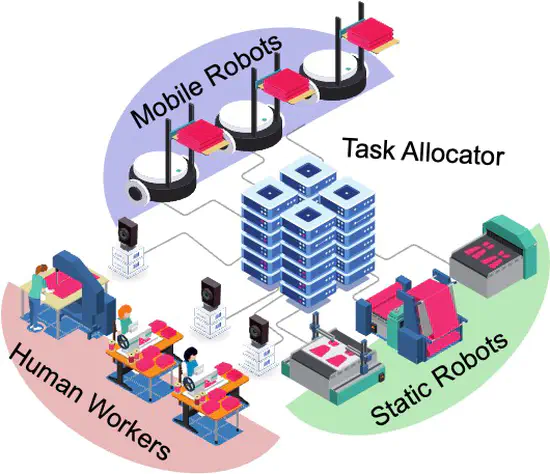
Automation for Transformable Production
Multi-robot Task Allocation and Control System on Transformable Production
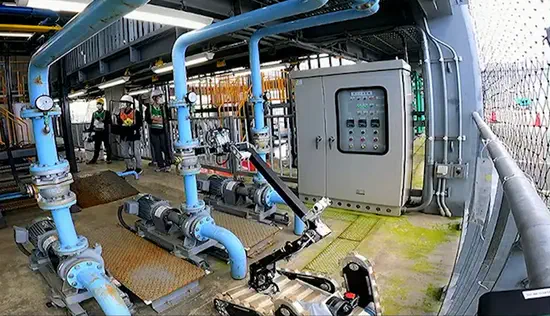
Disaster Prevention Challenge on World Robot Summit
Discover how a multi-modal robot team excelled in the Disaster Prevention Challenge at the World Robot Summit 2020, enhancing industrial plant inspections.
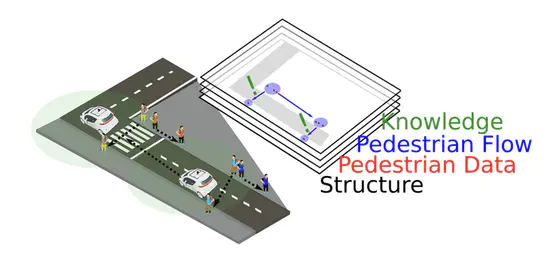
Knowledge Acquisition from Sparse Mobile Probe Data
This study provides different techniques to improve the perception for autonomous vehicles by knowledge acquisition.

Optimizing Construction Vehicle Interaction with Machine Learning
Leveraging Machine Learning for Optimized Interaction Between Autonomous Dump Trucks and Human-Operated Backhoes in Earthmoving Work.
Recent Publications
Contact
- ranulfo (at) tohoku.ac.jp
- +81 022-795-4871
- 6-6-01 Aramaki Aza Aoba, Aoba-ku., Sendai, Miyagi 980-8579